

Characteristics of research conducted in the laboratory:
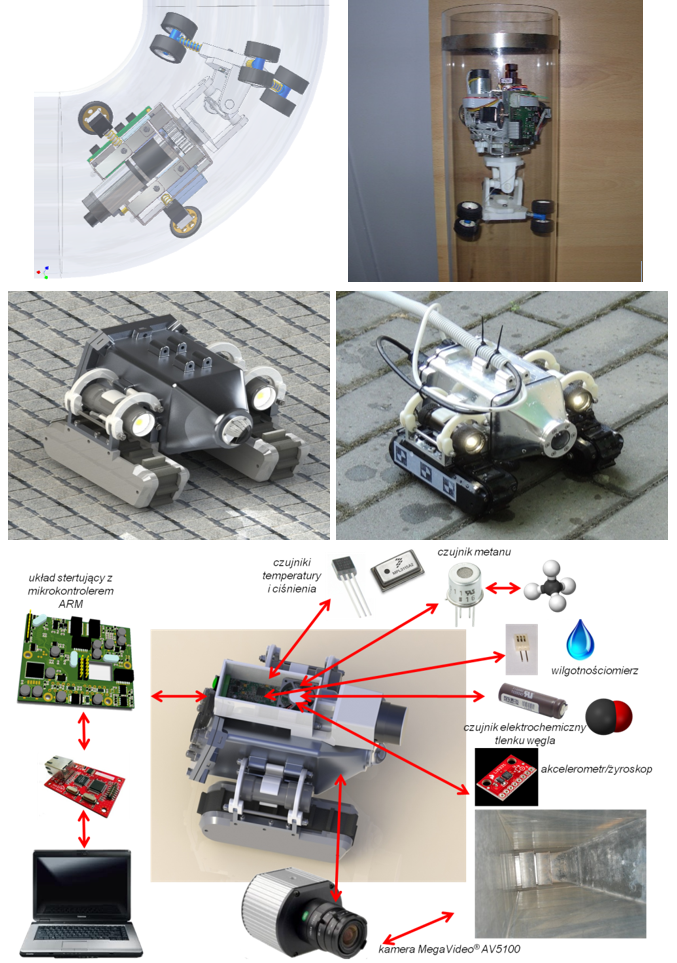
As part of the work related to inspection robotics at the Department of Applied Mechanics and Robotics, two robot structures (with a screw drive and a caterpillar drive) were designed and built. They enable monitoring and analysis of the technical condition of flat surfaces, ventilation ducts, horizontally and vertically mounted pipes, both “dry” and flooded with liquids. As part of the work, modular structures with the possibility of changing the configuration and adapting the robots to various requirements and needs were modeled and made, control systems were designed, electronic components were selected and control software was written.
Specification of the main research equipment of the laboratory:
- Mobile inspection robot with screw drive mechanism,
- Underwater mobile inspection robot with a caterpillar drive.
List of service and research works for the needs of the industrial environment that can be carried out in the laboratory:
- Research on the design, modeling and control of inspection robots,
- Research on the possibility of implementing mobile inspection systems in various environments (underwater, ventilation, etc.).
The design and construction of the robots resulted from the demand for this type of construction of the Municipal Water and Sewerage Company in Krakow.